基于MSP432P401R的MPU6050陀螺仪串口输出姿态角程序源码。基于MSP432P401R的MPU6050陀螺仪串口输出姿态角程序 实验器材: MSP432P401R MPU6050陀螺仪 硬件资源: 1,DS0(连接在PF9). 2,串口1(波特率:9600,P2.2/P2.3)....
”陀螺仪串口输出姿态角程序源码 MPU6050 MSP432P401R 陀螺仪“ 的搜索结果
基于MSP432P401R的MPU6050陀螺仪串口输出姿态角程序 实验器材: MSP432P401R MPU6050陀螺仪 硬件资源: 1,DS0(连接在PF9). 2,串口1(波特率:9600,P2.2/P2.3).. 3,MPU6050陀螺仪控制信号线如下 SDA <-------------> P6.4...
对比DMP和自己进行姿态解算:使用DMP我们可以直接得到四元数,但是如果不用DMP的话,就得自己来进行解算,根据得到的各轴角速度以及加速度,再经过滤波,接着计算出四元数或者欧拉角,然后还得进行姿态融合。...
STM32 HAL库移植MPU6050 DMP库。
基于MSP432P401R的MPU6050陀螺仪串口输出姿态角程序.zip

(CCS)基于MSP432P401R的MPU6050陀螺仪串口输出姿态角程序.zip
STM32F407ZE 驱动陀螺仪MPU6050的应用实例,实现如下功能: ①使用MPU6050的驱动实现陀螺仪遥控 左倾:LED1亮 右倾:LED2亮 前倾:LED3亮 后倾:LED4亮 使用的是获取的欧拉角!! ②做一个碰撞警告功能 如果板子在...
最近做电赛申请到了MSP432P401R板子,队友让我开发开发陀螺仪,期间遇到了MSP432P401R读取MPU6050的数值为0xff但是 ACK 是正常的的问题,花了几天时间解决了,所以写一篇总结记录一下ouo。 参考:I2C 读取总是 0xFF...
1、MPU6500/MPU6050是一个6轴的传感器,及加速度和角速度各有 x,y,z轴 相关数据手册可在网上找到,如立创商城 2、我这里使用I2C总线驱动MPU6500,要想后面的程序能调通,首先要确保I2C连续读写都正确,能读写MPU...
- *2* [基于MSP432P401R的MPU6050陀螺仪串口输出姿态角程序](https://blog.csdn.net/qq_43577213/article/details/118974772)[target="_blank" data-report-click={"spm":"1018.2226.3001.9630","extra":{"utm_...


mpu6050 集成了三轴 MEMS 陀螺仪,三轴 MEMS 加速度计,以及一个可扩展的数字运动处理器 DMP(Digital Motion Processor)。辅助I2C接口可以连接一个第三方的数字传感器,比如磁力计。扩展了磁力计之后就可以通过其...
六轴传感器MPU6050
标签: mpu6050
1.六轴与九轴的区别 六轴包括:三轴加速度计、三轴陀螺仪 九轴包括:三轴加速度计、三轴陀螺仪、三轴磁强计 2.MPU6050简单介绍 ...MPU6050 内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并且含有一个第二 IIC 接口
MPU6050是一款六轴(三轴加速度+三轴角速度(陀螺仪))传感器,该传感器广泛用于四轴、平衡车和空中鼠标等设计,具有非常广泛的应用范围。但在实践中,如制作平衡车,四旋翼时,我们需要得到横滚角(roll ),俯仰角...

笔者之前也接触过MPU6050模块,但是并没有真正的去了解内部的通讯方式与内部的寄存器操作,况且之前接触的程序是基于51单片机的,笔者只是使用者并未自己书写。虽然说,不管是基于51单片机还是基于STM32单片机,它...
MPU6050数据读取;数据融合。 1. IIC通信 为了移植的方便,这里的 IIC 采用软件模拟的方式实现。关于 IIC 的基础知识介绍,可参考IIC专题(一)——基础知识准备。 下面以程序的实现过程,梳理一下 IIC 的通信...
这个传感器学起来还是挺费劲的,找的资料都是参差不齐的,最好的学习方法当然是读datasheet,当然由于都是英文,有人看的头大,所以我尽量将datasheet作详细解释 参考了几个帖子,大家可以去看看 ...
第44章 MPU6050传感器—姿态检测 全套200集视频教程和1000页PDF教程请到秉火论坛下载:www.firebbs.cn 野火视频教程优酷观看网址:http://i.youku.com/firege 本章参考数据:《STM32F4xx参考手册》、...
- *3* [基于MSP432P401R的MPU6050陀螺仪串口输出姿态角程序](https://blog.csdn.net/qq_43577213/article/details/118974772)[target="_blank" data-report-click={"spm":"1018.2226.3001.9630","extra":{"utm_...
2.使用MPU6050自带的DMP获得四元数后进行姿态解算,得到当前传感器的俯仰角、横滚角以及航向角。 拓展要求: 能够将采集到的数据通过串口上传至PC,结合上述参数能够在一定时间范围内通过MATLAB等工具还原MPU6050...
小白能用,我就是小白
利用 STM32 单片机提供一个自然且高效的人机交互方法,设计并实现数据手套可以稳定地为虚拟现实系统提供姿态及运动数据,其应用增加了人机交互的沉浸感与灵活性,能够便捷地应用于其他虚实融合类系统。
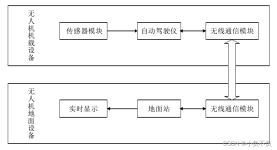
无人机飞控系统硬件设计
标签: 人工智能

一、绪论 1.1项目背景 以往事故现场的救援工作过程中,救援人员发现:由于房屋倒塌等情况的出现,导致地面形成若干个大小不一的裂缝和洞孔。 这时,救援人员因无法探测里面的情况,进行无法开展救援任务。盲目地撬...
推荐文章
- 解决微信小程序 picker 模式日期,设置默认当前时间_"picker mode=\"date"-程序员宅基地
- 区块链概述-程序员宅基地
- 使用Gitlab 搭建私有镜像仓库(外置Nginx)_docker gitlab 使用外部nginx-程序员宅基地
- python之uWSGI和WSGI-程序员宅基地
- Java---简单易懂的KNN算法_jf.knn-%; 9 &-程序员宅基地
- 最新版ffmpeg 提取视频关键帧_从视频中获取flag-程序员宅基地
- 【ARM Cache 系列文章 11 -- ARM Cache 直接映射 详细介绍】
- Objective-C学习计划
- 【数据结构】最小生成树(Prim算法、Kruskal算法)解析+完整代码
- python访问组策略_python 模块 wmi 远程连接 windows 获取配置信息-程序员宅基地